
自古以来,人类就对天空有着无限的向往。FPV让人们站在大地上,一眼就能看到天空的壮丽和美丽。FPV的观看和使用都非常有趣,高速带来的刺激往往让人心潮澎湃。
FPV的组成对新手来说比较复杂,今天就让我们用最简单的语言来简单介绍一下吧。让我们开始吧!
1.车架
FPV框架是飞行器非常重要的一个部件,所有的部件都在它上面成型,框架要始终保持轻量,太重的机型虽然稳定但可能会导致飞行不畅。框架需要保持重量轻、坚固和高刚性。车身材质通常会选择塑料和碳纤维,而碳纤维车架永远是最佳选择。选择框架时应考虑以下要素:
- 车架形状: 有几种不同的车架形状可供选择,例如 X 设计、H 设计、混合 X、箱形等。每种都有不同的性能统计数据。比如X架最适合FPV竞速,H架更适合自由式飞行

- 框架尺寸: 框架尺寸范围从 90 毫米到超过 280 毫米。因此,选择合适尺寸的框架非常重要,因为它会影响无人机的重量和性能。
- 组件间距: 重要的是检查框架是否有足够的间距用于支撑、飞行控制器、相机支撑等。
2.电调
电调的全称是electronic speed controller,又称电调,电调的作用主要是控制机器的启停和速度,有的电调可以用来给接收器供电。针对不同的电机,电调分为有刷电调和无刷电调。有刷电调简单来说就是直流输出,无刷电调是将直流电转换为交流电,电调的输入是直流电,可以接稳压电源或者锂电池。
匹配原则:电调的输出电流必须大于电机的输出电流,电池的输出电流要大于电机的输出电流。
3.3.飞控
飞控是能够稳定FPV飞行器姿态,控制FPV进行半自动飞行或全自动飞行的控制系统。飞行控制可以看作是无人机的大脑。它向电机发送信号以特定方式运行。FC 包含每秒执行数千次的算法,以使您的无人机保持在空中。它们还有陀螺仪和加速度计等传感器。飞行控制器有多种选择。带有内置 PDB(配电板)的飞行控制器。具有集成 PDB 的 FC 更好,因为它们最大限度地减少了所需的布线和焊接。
4.发电机
拥有高质量的电机可以发挥重要作用。电机带动螺旋桨旋转,为无人机飞行产生推力。您将需要四个无刷外转子电机来构建 FPV 赛车无人机。
电机分为高定子和宽定子两大类。电机的定子是包含电机的14个永磁体的外壳。简单地说,定子越高,转速越高。定子越宽,产生的扭矩就越大。因此,高定子电机是竞速无人机的理想选择。无刷电机是利用半导体开关器件实现电子转向,常用电机为2204 2300KV电机,前两位数字为定子外径(mm),后两位为定子高度(mm)外径越大定子的直径和高度越大,定子的功率越大,同时也越重。2300表示1V时的转速,每增加1转增加2300转

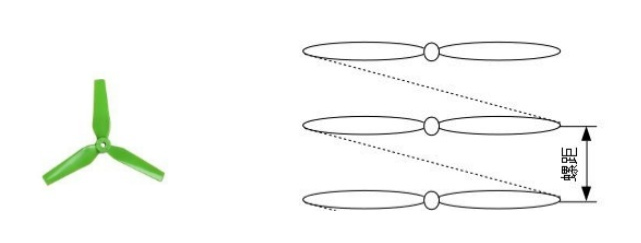
5. S组螺旋桨
今天的大多数螺旋桨都是由聚碳酸酯塑料制成的。这使它们非常耐用。市场上可以看到很多尺寸的螺旋桨,比如7045、8045、9045、1045等,最后两个数字代表螺旋桨的螺距,前两个代表螺旋桨的直径。以7045为例,45表示这款螺旋桨的螺距为4.5英寸,70表示这款螺旋桨的直径尺寸为7.0英寸。
6.图片传输
图片传输分为模拟图片传输和数字图片传输。模拟图像传输是对时间和幅度连续变化的模拟图像信号的信源和通道处理。
数字图像传输是指将数字化的图像信号经过信息源和信道编码,通过微波、光纤等方式进行传输。
7.电池
电池编号:FPV通常由几个独立的电芯串联而成,3S是指电池由3个电芯并联而成。不同的穿越机需要不同的S号电池
mAh:表示电池容量。
电池C数:表示电池的放电率,当需要更大的电量时,需要选择更大C数的电池。以1500mAh 4s电池为例,则此时电池组总电压为4×3.7=14.8(标准电压)

